6.9 KiB
概要设计
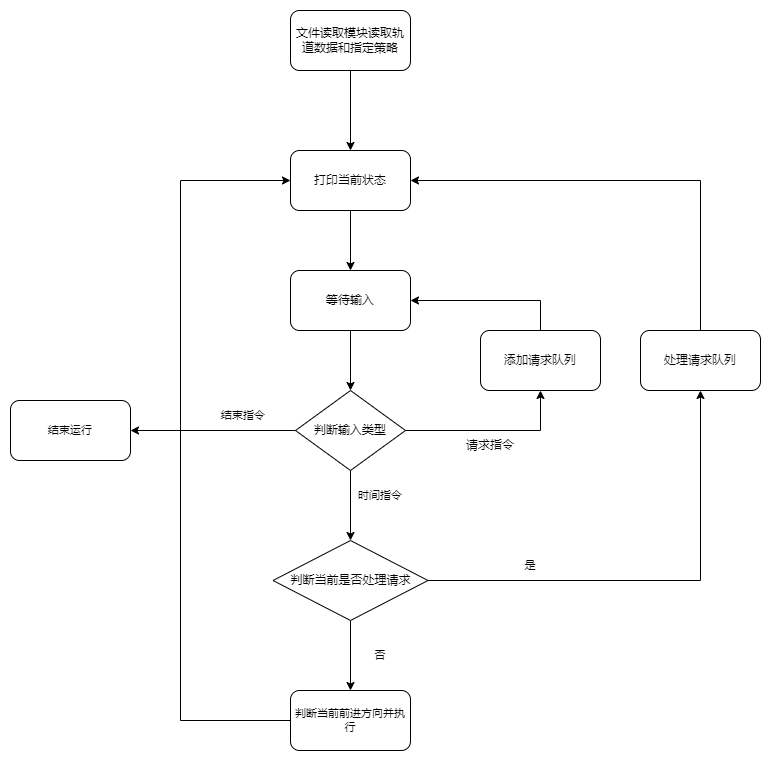
main函数流程
轨道模块
轨道模块是比较基础的模块,许多模块都建立在这个模块的基础上
模块的主体是一个表示每个轨道节点的结构体。
创建结构体
/**
* 创建轨道列表
* @param length 站点之间的距离
* @param node_num 站点的个数
* @return 指向首站的指针
*/
rail_node_t * CreateRails(int length, int node_num);
这个函数的难点应该是创建一个双向的循环链表。
寻找指定的站点
/**
* 查找指定编号的站点指针
* @param rails 轨道的头节点地址
* @param id 需要查找的站点编号
* @return 需要查找站点指针
*/
rail_node_t *FindNode(rail_node_t rails, int id);
比较重要的工具函数,给定编号寻找对应的站点站点指针,不过没啥难度。
公交车模块
公交车模块就是比较复杂的模块了。
模块的主体是一个表示公交车的结构体。
运行公交车
/**
* 每个时刻使公交车前进
* @param rails 轨道链表
* @param direction 公交车前进的方向
* @param bus 公交车
* @return 公交车是否到达站点
*/
int RunBus(rail_node_t* rails, bus_t bus, int direction);
这个函数不难,就是根据指定的方向让公交车前进,同时判断公交车是否到站。
请求模块
请求模块的核心是一个表示请求的结构体。
创建请求
/**
* 创建请求
* @param query 请求链表队列
* @param type 请求的类型
* @param node 请求产生/指向的站点
*/
void CreateQuery(bus_query_t query, int type, rail_node_t node);
还是一个简单的链表创建函数,主要的关键点在于说明的第五点第四条:
如果在某个请求没有完成时再有相同的请求(请求类型和站点全部相同)发生,则该请求被抛弃
也就是在创建的时候要判断是否已存在相同的请求。
删除请求
删除请求其实就是处理请求的同义词
这个函数没啥意思,就是删除一个链表节点。
控制器模块
全程序最复杂的模块
时间计算
一个int类型的全局变量储存全局的时间。
/**
* 时间增加
*/
void AddTime();
一个可有可无的函数,负责将时间加一。
可能后期删除,作用不明显。
策略简述
策略的相关函数会在公交车到站的时候调用。
策略一般包括两个函数,方向控制函数和请求处理函数。
先来先服务策略(FCFS)
first come first serve
对于先来先服务策略,车一次停站只完成一个请求,即使在这个站点上即有乘车请求,车内也有到该站的请求,也只能按策略完成已经调度的那个请求。但是完成当前请求后,如果发现时间序列上后续的一个或多个连续请求都恰好在同一站点(即连续的同站点请求位置相同,但请求类型不同),则可以立即完成这些连续的同站点请求,也就是说特殊情况下,一次停车的1秒内可完成多个请求。
方向
/**
* 在先来先服务策略下应该前进的方向
* @param bus 公交车
* @param queries 请求队列链表
* @return 前进的方向
*/
int FCFSDirection(bus_t bus, bus_query_t queries);
直接给出最先的一个请求就可以了。
将给定的请求赋给全局变量。
请求
/**
* 在先来先服务策略下给出处理的请求
* @param bus 公交车
* @param queries 请求队列链表
* @return 需要处理的请求
*/
bus_query_t FCFSQuery(bus_t bus, bus_query_t queries);
按照指定的策略给出现在可以处理的请求。
在这里是当前所在站点和第一个请求指向站点相同是即可处理,而且连续处理。
最短寻找时间优先(SSTF)
对于最短寻找时间优先策略,一次服务的目标请求一旦确定,即使中途产生更优的请求也不可以更改。但如果新的请求恰好可以顺便服务(同方向的站台请求或车内请求),可以为新的请求停站。具体为:程序计算离当前车的位置最近的请求,如果没有请求则原地不动,否则按最近的路线(顺、逆时针)去接(送)。如果车途中遇到与车目前同方向的上车或下车请求,可以停下一秒解决,反方向的上车请求不停车。车服务完目标后,反复此过程,直到end。特别地,当车到达目标站点时,可以停一次车(1秒钟)完成该站点已接收的所有类型请求(区别于顺便站停靠)。
方向
/**
* 在最短寻找时间策略下应该前进的方向
* @param bus 公交车
* @param queries 请求队列链表
* @return 前进的方向
*/
int SSTFDirection(bus_t bus, bus_query_t queries);
这个函数比较难,求出最短前进的方向即可。
将处理的请求赋给全局变量。
请求
/**
* 在最短寻找时间策略给出处理的请求
* @param bus 公交车
* @param queries 请求队列链表
* @return 需要处理的请求
*/
bus_query_t SSTFQuery(bus_t bus, bus_query_t queries);
给出当前需要处理的请求。注意有些请求时可以处理的,有些请求时不能顺便处理的。
顺便服务策略(SCAN)
方向
/**
* 顺便服务的前进方向
* @param bus 公交车
* @param queries 请求队列链表
* @return 前进的方向
*/
int SCANDirection(bus_t bus, bus_query_t queries);
也是判断最短的前进方向,但是
输入输出模块
输入输出模块是比较基础的模块,主要作用就是调用其他模块实现的功能。
配置文件读取
/**
* 读取配置文件,创建轨道链表,同时读取需要使用的策略
* @return 指向轨道链表的指针
*/
rail_node_t* ReadConfigFile();
这个函数需要完成三个任务:
- 解析配置文件。(重点)
- 调用函数创建轨道列表。
- 读取指定的策略。
打印当前状态
/**
* 打印当前的状态
* @param rails 轨道链表
* @return 返回需输出的字符串
*/
char* PrintState();
输出的格式如下:
TIME:秒数
BUS:
position:0
target: 0000000000
STATION:
clockwise: 0000000000
counterclockwise: 0000000000
这个函数的实现应该不难,遍历几个链表就结束了。
返回一个字符串是为了便于测试,直接
printf出来不好测试,也不符合解耦的设计策略。
读取输入
/**
* 读取标准输入流中的输入
* @param inputString 输入的字符串
* @return 当前读取的状态
*/
int ReadInput(char* inputString);
这个函数的实现比较困难,在于读取对应的输入并调用相关的函数。
输出的int值是一系列定义的宏:
#define IO_CLOCK 0 // 读取时钟指令
#define IO_READING 1 // 读取请求指令
#define IO_END 2 // 读取结束指令
便于main函数确定下一步的行为。